3 Faster-RCNN网络
2.3 Faster-RCNN网络
Section titled “2.3 Faster-RCNN网络”学习目标
- 熟悉FasterRCNN目标检测的思想
- 知道anchor(锚框)的思想
- 掌握RPN网络是如何进行候选区域的生成的
- 掌握ROIPooling的使用方法
- 知道fasterRCNN的训练方法
在R-CNN和Fast RCNN的基础上,在2016年提出了Faster RCNN网络模型,在结构上,Faster RCNN已经将候选区域的生成,特征提取,目标分类及目标框的回归都整合在了一个网络中,综合性能有较大提高,在检测速度方面尤为明显。接下来我们给大家详细介绍fasterRCNN网络模型。网络基本结构如下图所示:
Faster RCNN可以看成是区域生成网络(RPN)与Fast RCNN的组合,其中区域生成网络(RPN)替代选择性搜索来生成候选区域,Fast RCNN用来进行目标检测。
1. 网络工作流程
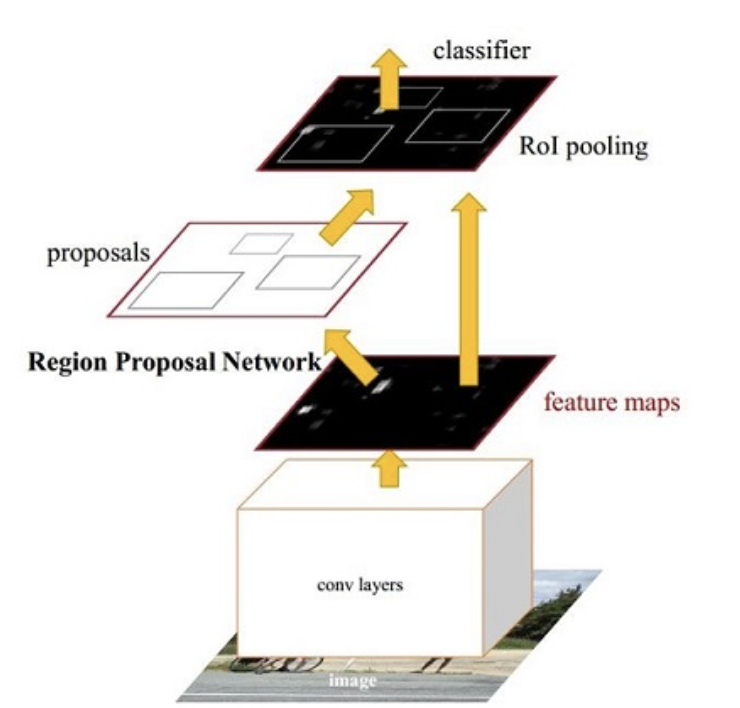
Section titled “1. 网络工作流程”FasterRCNN的工作流程是:
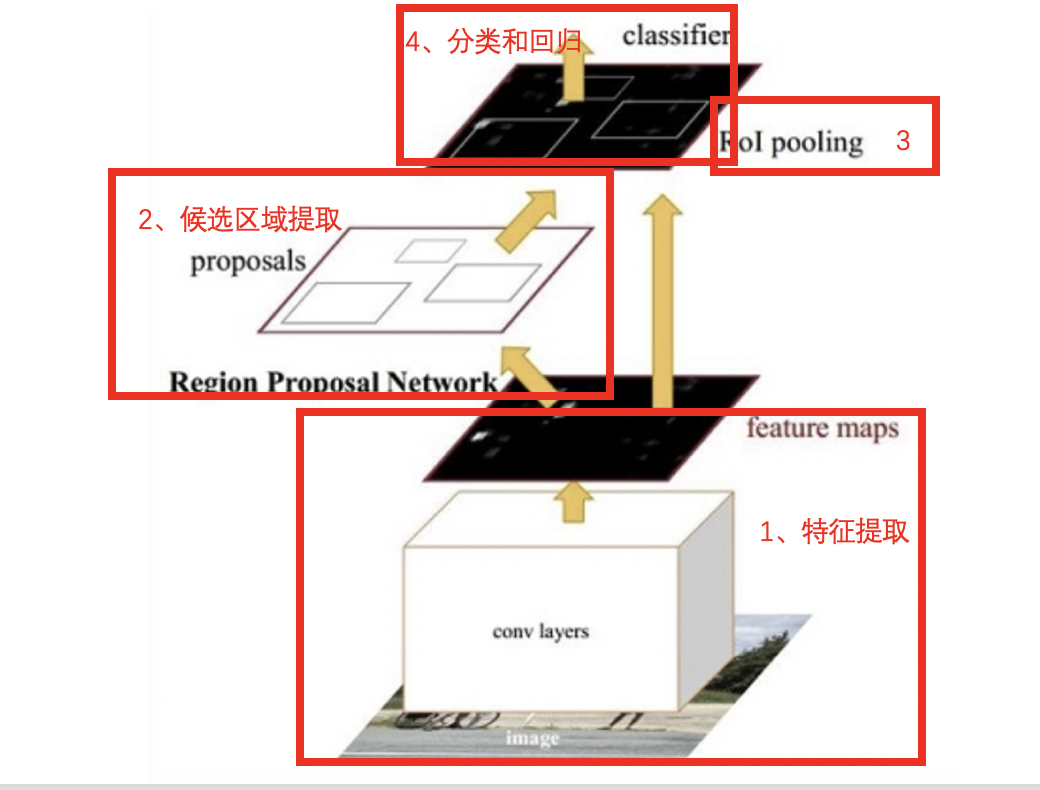
1、特征提取:将整个图像缩放至固定的大小输入到CNN网络中进行特征提取,得到特征图。
2、候选区域提取:输入特征图,使用区域生成网络RPN,产生一些列的候选区域
3、ROIPooling: 与Fast RCNN网络中一样,使用最大池化固定候选区域的尺寸,送入后续网络中进行处理
4、目标分类和回归:与Fast RCNN网络中一样,使用两个同级层:K+1个类别的SoftMax分类层和边框的回归层,来完成目标的分类和回归。
Faster R-CNN的流程与Fast R-CNN的区别不是很大,重要的改进是使用RPN网络来替代选择性搜索获取候选区域,所以我们可以将Faster R-CNN网络看做RPN和Fast R-CNN网络的结合。
接下来我们使用torchvison工具包来看下fasterRCNN预训练模型的使用过程。torchvision安装时直接使用:
pip install torchvision即可,在安装torchvision时,应保证已安装了pytorch。
接下来我们按照以下步骤进行目标检测:
- 获取数据和加载预训练网络
- 获取网络的目标检测结果
该部分代码在fasterRCNN.ipynb中,首先导入相应的工具包:
# pytorh相关的工具包import torchimport torchvisionimport torchvision.transforms as transformsfrom torchvision.io import read_image# 读取图像的工具包from PIL import Image# 绘图import matplotlib.pyplot as plt1.1 数据加载
Section titled “1.1 数据加载”该部分代码在fasterRCNN.ipynb中,加载一张图片送入网络中进行预测:
# 获取图片img = Image.open('img3.jpg')plt.imshow(img)图片展示如下:
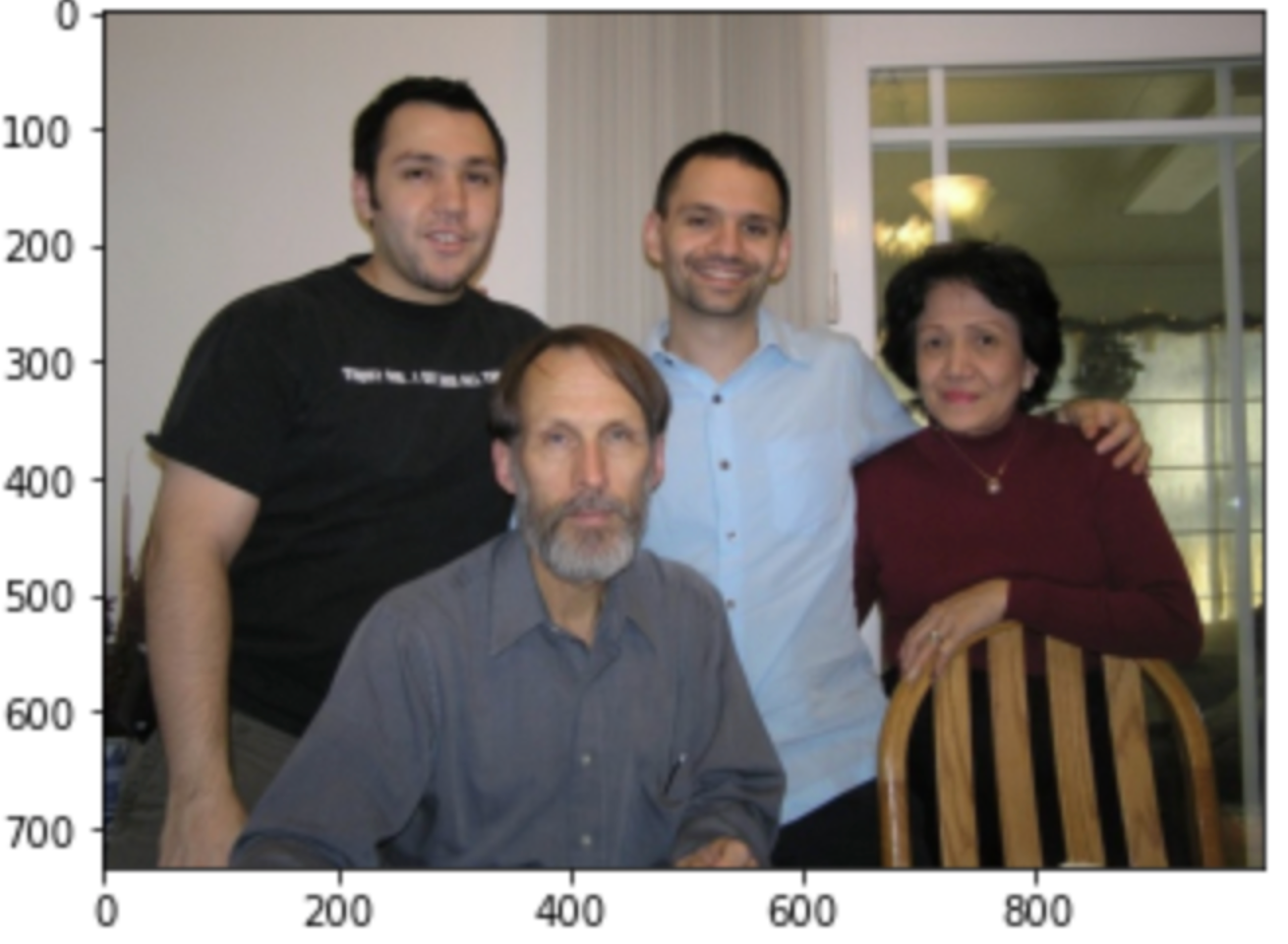
原始图像的大小
img.size输出为:
(994, 734)在将图像送入网络之前,我们对其进行了尺度的调整,类型转换等处理,如下所示:
# 将图片格式转换为tensor形式,大小转换为800x800的大小transform = transforms.Compose([transforms.ToTensor(),transforms.Resize((800,800))])img = transform(img)送入网络中图像的大小为:
img.shape输出为(pytorch中送入网络中的图像的表示形式【C,H,W】):
torch.Size([3, 800, 800])我们将其展示出来,如下所示:
# 进行通道的调整plt.imshow(img.permute(1,2,0))展示结果为:
图像被我们从原始的(994, 734)转换为800x800的大小,可送入网络中进行预测。
1.2 模型加载
Section titled “1.2 模型加载”该部分代码在fasterRCNN.ipynb中,加载使用coco数据集预训练的模型,对图像进行预测,CoCo数据预训练的模型可检测90类的目标,如下所示:
# coco数据集的class,共90个类别:人,自行车,火车,。。。coco_names = [ '__background__', 'person', 'bicycle', 'car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light', 'fire hydrant', 'N/A', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow', 'elephant', 'bear', 'zebra', 'giraffe', 'N/A', 'backpack', 'umbrella', 'N/A', 'N/A', 'handbag', 'tie', 'suitcase', 'frisbee', 'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard', 'tennis racket', 'bottle', 'N/A', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple', 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch', 'potted plant', 'bed', 'N/A', 'dining table', 'N/A', 'N/A', 'toilet', 'N/A', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone', 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'N/A', 'book', 'clock', 'vase', 'scissors', 'teddy bear', 'hair drier', 'toothbrush']实例化faster-RCNN模型,并加载预训练好的模型参数:
# 实例化模型model = torchvision.models.detection.fasterrcnn_resnet50_fpn(pretrained=True)将模型设置为预测模式:
# 将模型设置为eval模式model.eval()这时我们可以大致看下模型的结构,为了更清晰的了解fasterRCNN的结构,删除了一些细节信息,如下所示:
FasterRCNN( (transform): GeneralizedRCNNTransform( Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]) Resize(min_size=(800,), max_size=1333, mode='bilinear') ) (backbone): BackboneWithFPN( (body): IntermediateLayerGetter( (conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False) (bn1): FrozenBatchNorm2d(64, eps=0.0) (relu): ReLU(inplace=True) (maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False) 。。。。。 (fpn): FeaturePyramidNetwork( (inner_blocks): ModuleList( (0): Conv2d(256, 256, kernel_size=(1, 1), stride=(1, 1)) (1): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1)) (2): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1)) (3): Conv2d(2048, 256, kernel_size=(1, 1), stride=(1, 1)) 。。。。 ) ) (rpn): RegionProposalNetwork( (anchor_generator): AnchorGenerator() (head): RPNHead( (conv): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (cls_logits): Conv2d(256, 3, kernel_size=(1, 1), stride=(1, 1)) (bbox_pred): Conv2d(256, 12, kernel_size=(1, 1), stride=(1, 1)) ) ) (roi_heads): RoIHeads( (box_roi_pool): MultiScaleRoIAlign(featmap_names=['0', '1', '2', '3'], output_size=(7, 7), sampling_ratio=2) (box_head): TwoMLPHead( (fc6): Linear(in_features=12544, out_features=1024, bias=True) (fc7): Linear(in_features=1024, out_features=1024, bias=True) ) (box_predictor): FastRCNNPredictor( (cls_score): Linear(in_features=1024, out_features=91, bias=True) (bbox_pred): Linear(in_features=1024, out_features=364, bias=True) ) ))从这里可以看出,torchvision中的fasterRCNN的主要包含:
- Transform: 完成数据的标准化处理,并且设置图像的大小最小为800
- backbone: 主要包括特征提取的body部分和特征融合fpn网络
- rpn: 主要用来生成候选区域
- Roi_heads: 返回检测结果
1.3 模型预测过程
Section titled “1.3 模型预测过程”该部分代码在fasterRCNN.ipynb中,接下来我们将数据送入网络中进行预测:
# 直接进行预测pred = model([img])预测结果中包括网络的检测框,类别信息及每个检测框对应的置信度值,如下所示:
[{'boxes': tensor([[ 22.1207, 68.7210, 309.7885, 791.1606], [359.6369, 110.5316, 558.7224, 780.3055], [ 86.0154, 291.1066, 458.9595, 785.5111], [516.1552, 217.6513, 767.1631, 745.2240], [532.2499, 537.4729, 771.5016, 790.0735], [664.4442, 284.9143, 722.0727, 367.2327], [ 18.3442, 456.8345, 734.2274, 777.7546]], grad_fn=<StackBackward0>), 'labels': tensor([ 1, 1, 1, 1, 62, 64, 15]), 'scores': tensor([0.9981, 0.9981, 0.9980, 0.9962, 0.9832, 0.0695, 0.0604], grad_fn=<IndexBackward0>)}]每个检测框对应的类别通过labels进行表示,接下来我们获取每个检测框的类别名称:
# 获取类别名称,框及对应的置信度pred_class = [coco_names[i] for i in list(pred[0]['labels'].numpy())]pred_boxes = [[(i[0], i[1]), (i[2], i[3])] for i in list(pred[0]['boxes'].detach().numpy())]pred_score = list(pred[0]['scores'].detach().numpy())将框的类别如下所示:
['person', 'person', 'person', 'person', 'chair', 'potted plant', 'bench']对应的概率值为:
[0.9980987, 0.9980934, 0.9980253, 0.99623007, 0.9832487, 0.069459654, 0.060414173]我们将这些框绘制在图像上:
# 图像读取img = Image.open('img3.jpg').resize((800,800))# 图像展示fig = plt.imshow(img)# 将框绘制在图像上for index, boxes in enumerate(pred_boxes): fig.axes.add_patch(plt.Rectangle( xy=(boxes[0]), width=boxes[1][0]-boxes[0][0], height=boxes[1][1]-boxes[0][1], fill=False, edgecolor="blue", linewidth=1))plt.show()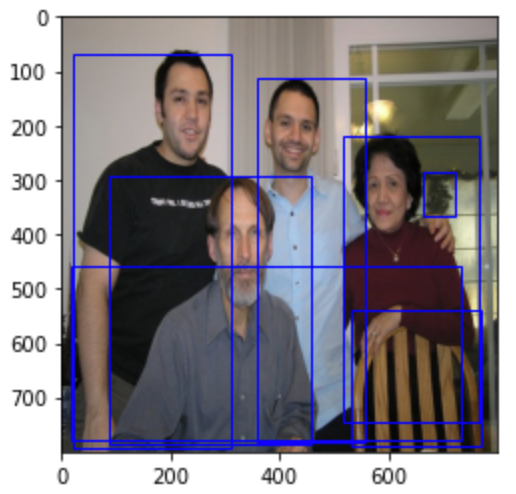
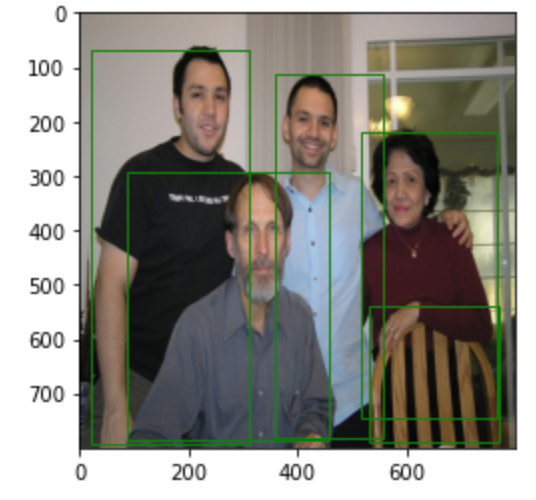
在这些预测框中有些目标的置信度较低,我们进行过滤,设置置信度阈值:
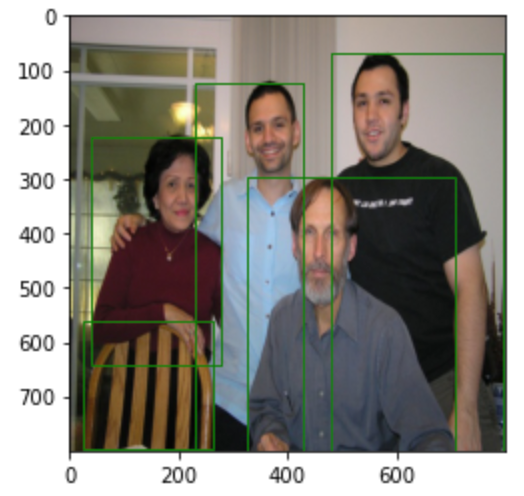
# 过滤分数较低的预测threshold=0.5# 因pred_score是从大大小进行排列的,只要获取最后一个索引即可pred_t = [pred_score.index(x) for x in pred_score if x > threshold][-1]pred_boxes = pred_boxes[:pred_t + 1]pred_class = pred_class[:pred_t + 1]获取过滤后的框及对应的类别结果展示在图像上:
# 将过滤后的结构绘制在图像上img = Image.open('img3.jpg').resize((800,800))# 绘制图像fig = plt.imshow(img)# 将框绘制在图像上for index, boxes in enumerate(pred_boxes): fig.axes.add_patch(plt.Rectangle( xy=(boxes[0]), width=boxes[1][0]-boxes[0][0], height=boxes[1][1]-boxes[0][1], fill=False, edgecolor="g", linewidth=1))plt.show()最终的检测结果:
上述我们介绍了Faster RCNN的工作流程并且给大家展示了网络的检测结果。那接下来我们解决以下几个问题:
1、网络中的每一部分是怎么构建,怎么完成相应的功能的?
2、怎么训练fastrcnn网络去完成我们自己的任务?
那接下来我们就解决上述问题。
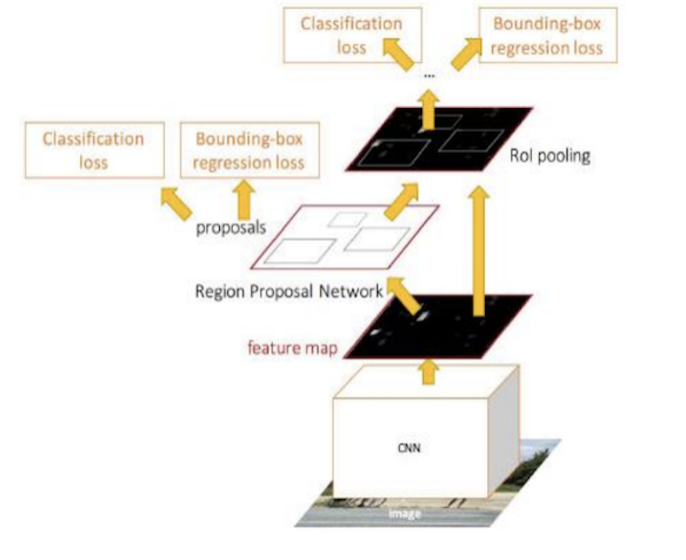
2.模型结构详解
Section titled “2.模型结构详解”Faster RCNN的网络结构如下图所示:
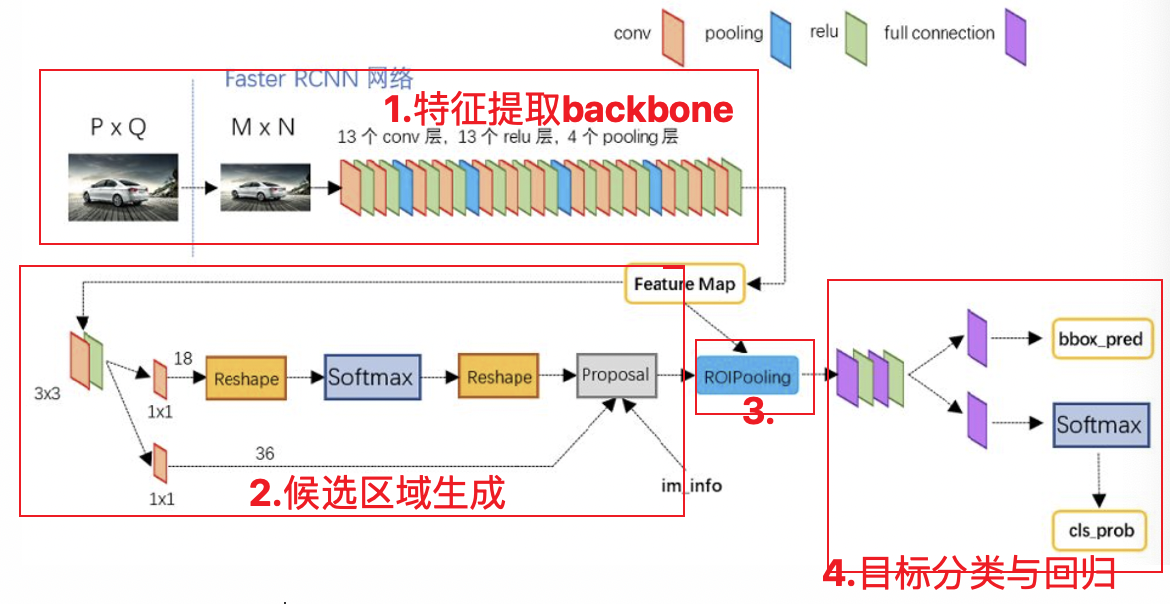
我们依然将网络分为四部分:
- Backbone:Backbone由CNN卷积神经网络构成,常用的是VGG和resnet, 用来提取图像中的特征,获取图像的特征图。该特征图被共享用于后续RPN层生成候选区域和ROIPooling层中。
- RPN网络:RPN网络用于生成候选区域,用于后续的目标检测。
- Roi Pooling: 该部分收集图像的特征图和RPN网络提取的候选区域位置,综合信息后获取固定尺寸的特征,送入后续全连接层判定目标类别和确定目标位置。
- 目标分类与回归: 该部分利用ROIpooling输出特征向量计算候选区域的类别,并通过回归获得检测框最终的精确位置。
接下来我们就从这四个方面来详细分析fasterRCNN网络的构成,并结合源码理解每一部分实现的功能。
在进行网络处理前,我们先将图像送入transform进行处理:该部分代码在fasterRCNN.ipynb中,
# 送入网络中的数据是【N,C,H,W】images = [img]images, targets = model.transform(images, targets=None)接下来讲images送入网络中进行处理即可。
2.1backbone
Section titled “2.1backbone”backbone一般为VGG,ResNet等网络构成,主要进行特征提取,将最后的全连接层舍弃,得到特征图送入后续网络中进行处理。
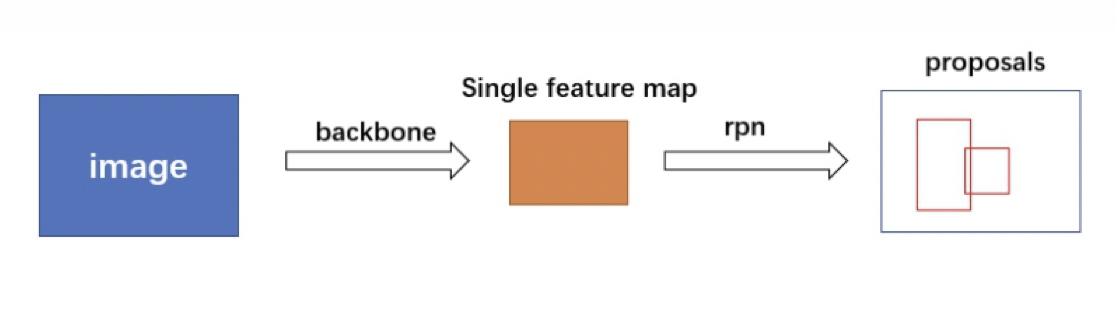
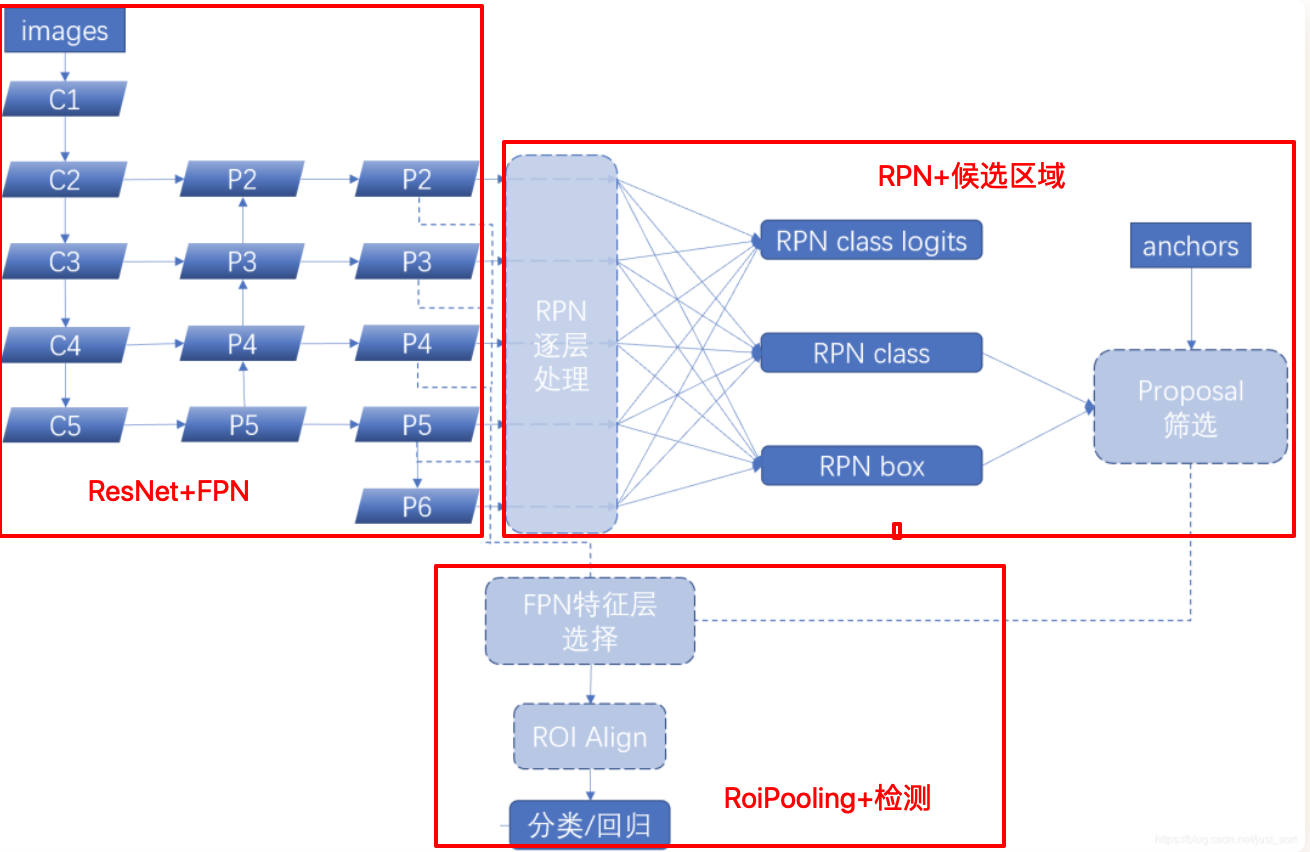
在源码中使用ResNet + FPN 结构来提取特征。与普通的 FasterRCNN 只需要将一个特征图输入到后续网络中不同,由于加入 FPN结构,需要将多个特征图逐个送入到后续网络中,如下图所示:
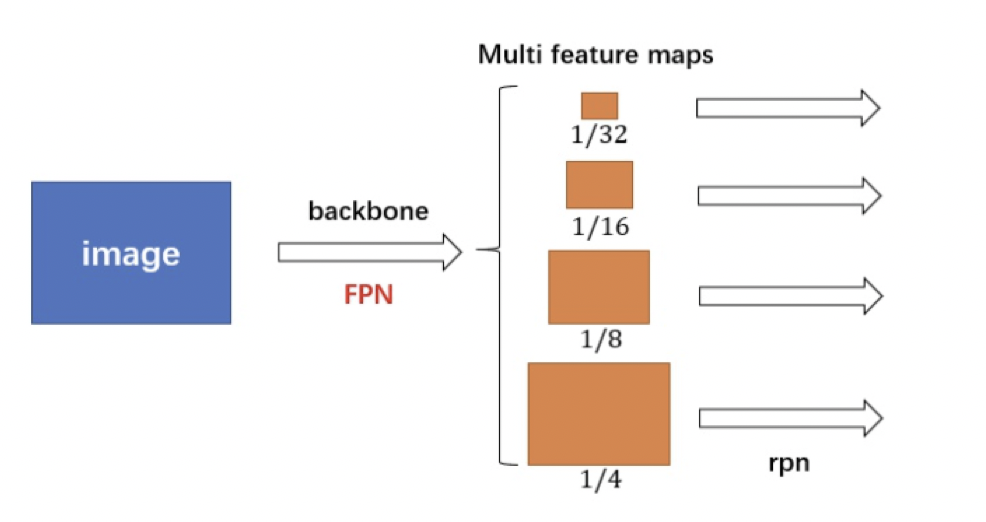
Resnet进行特征提取,FPN结构作用是当前层的特征图会融合未来层的特征进行上采样,并加以利用。因为有了这样一个结构,当前的特征图就可以获取未来层的信息,也就将低阶特征与高阶特征就有机融合起来了,提升检测精度。如下图所示:
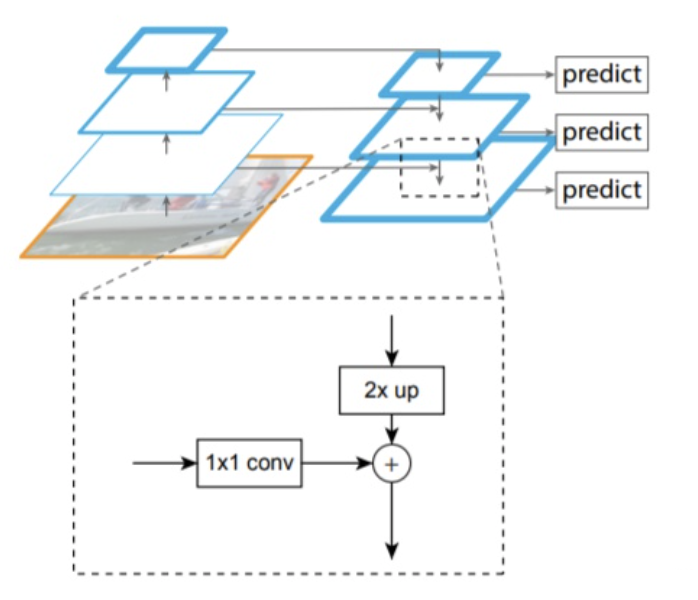
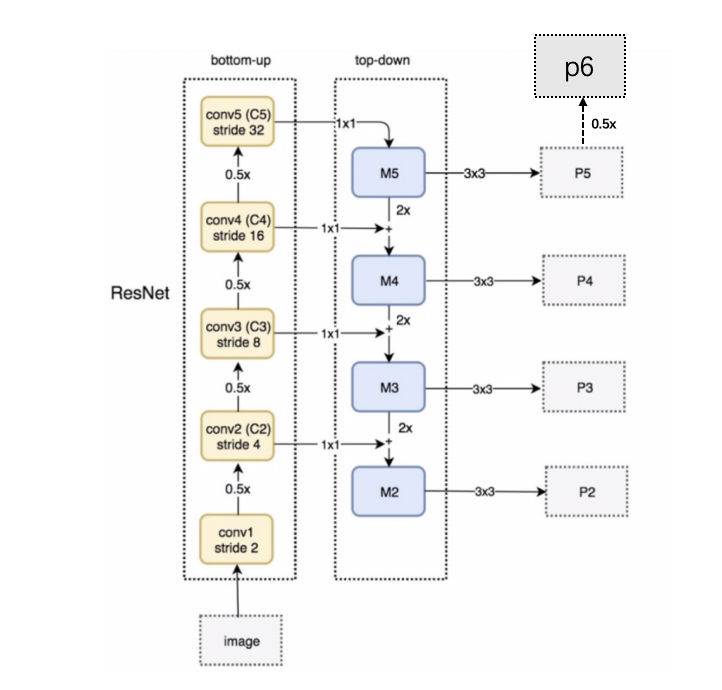
在这里ResNet和FPN的完整结构如下图所示:Resnet进行特征提取,FPN网络进行特征融合获取多个特征图后,输入到RPN网络中的特征图是[p2,p3,p4,p5,p6] ,而作为后续目标检测网络FastRCNN的输入则是 [p2,p3,p4,p5] 。
我们看下源码实现的内容:
1、resnet特征提取的结果
# 使用backbone获取特征图features_body = model.backbone.body(images.tensors)C2,C3,C4,C5 = features_body.values()C2,C3,C4,C5是resnet进行特征提取的结果,送入网络中图像大小为(3,800,800),经过特征提取后特征图的大小为:
# C2.size():800/4torch.Size([1, 256, 200, 200])# C3.size():800/8torch.Size([1, 512, 100, 100])# C4.size():800/16torch.Size([1, 1024, 50, 50])# C5.size():800/32torch.Size([1, 2048, 25, 25])2、FPN特征融合的结果
# FPN网络融合:C2,C3,C4,C5是resnet提取的特征结果features_fpn = model.backbone.fpn(features_body)P2,P3,P4,P5,P6 = features_fpn.values()P2,P3,P4,P5,P6是特征融合之后的结果,送入后续网络中,其特征图的大小:
# P2.size():800/4torch.Size([1, 256, 200, 200])# P3.size():800/8torch.Size([1, 256, 100, 100])# P4.size():800/16torch.Size([1, 256, 50, 50])# P5.size():800/32torch.Size([1, 256, 25, 25])# P6.size():800/64torch.Size([1, 256, 13, 13])那网络的整体架构表示成:
2.2 RPN网络
Section titled “2.2 RPN网络”经典的检测方法生成检测框都非常耗时,如overfeat中使用滑动窗口生成检测框;或如R-CNN使用选择性搜索方法生成检测框。而Faster RCNN则抛弃了传统的滑动窗口和选择性搜索的方法,直接使用RPN生成候选区域,能极大提升检测速度。
RPN网络的主要流程是:
1、生成一系列的固定参考框anchors,覆盖图像的任意位置,然后送入后续网络中进行分类和回归
2、分类分支:通过softmax分类判断anchor中是否包含目标
3、回归分支:计算目标框对于anchors的偏移量,以获得精确的候选区域
4、最后的Proposal层则负责综合含有目标的anchors和对应bbox回归偏移量获取候选区域,同时剔除太小和超出边界的候选区域。
2.2.1 anchors
Section titled “2.2.1 anchors”anchor在目标检测中表示 固定的参考框 ,首先预设一组不同尺度不同长宽比的固定参考框,覆盖几乎所有位置, 每个参考框负责检测与其交并比大于阈值 (训练预设值,常用0.5或0.7) 的目标 ,anchor技术将候选区域生成问题转换为 “这个固定参考框中有没有目标,目标框偏离参考框多远” ,不再需要多尺度遍历滑窗,真正实现了又好又快。
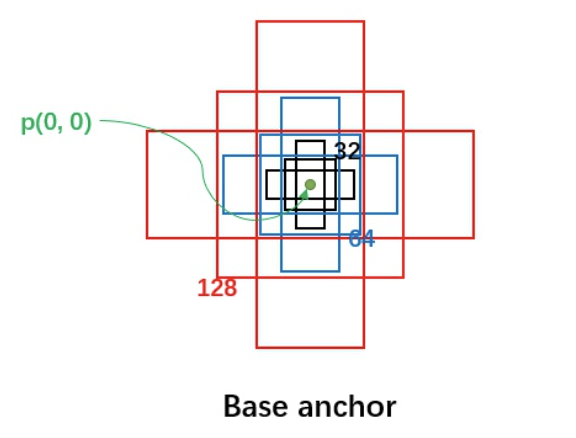
在FastRCNN中框出多尺度、多种长宽比的anchors,如下图所示:下图中分别是尺度为32,64,128,长宽比为1:1,1:2,2:1的一组anchors,我们利用这组anchor在特征图上进行滑动,并对应到原图上即可获取一系列的固定参考框。
由于有 FPN 网络,所以会在多个不同尺度特征图中生成anchor,假设某一个特征图大小为hxw,首先会计算这个特征相对于输入图像的下采样倍数 stride:
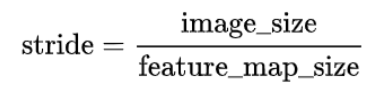
如下图所示:
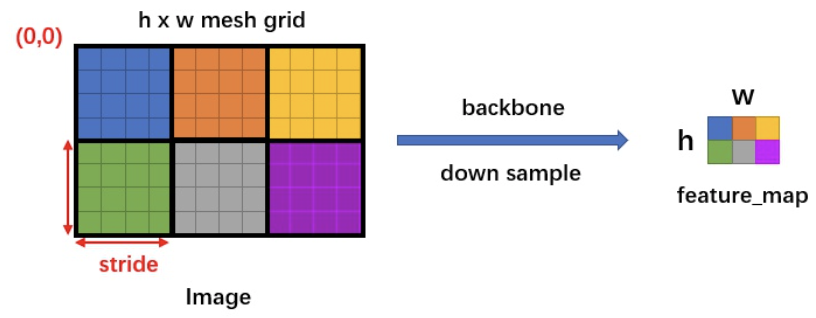
每一个尺度特征图上生成不同比列的anchor:
得到一系列的anchors后就可送入后续网络中进行分类和回归。
该部分代码在fasterRCNN.ipynb中,在源码中我们可生成一幅图像对应的anchors:
# 生成anchors,送入图片信息及相应的特征图anchors=model.rpn.anchor_generator(images,[P2,P3,P4,P5,P6])对于800x800的图像生成的anchor的数量为:
# anchors[0].size():#200*200*3+100*100*3+50*50*3+25*25*3+13*13*3=159882torch.Size([159882, 4])anchor的取值为:
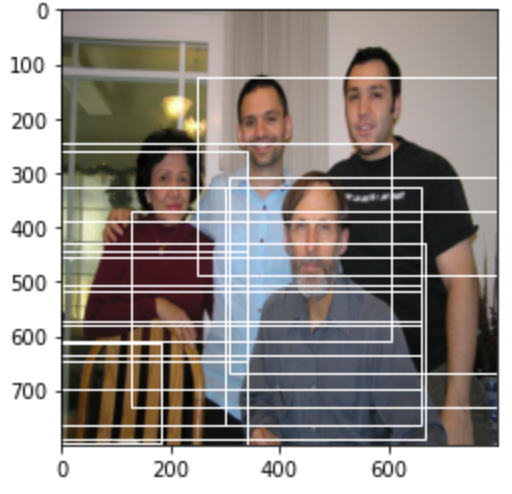
[tensor([[ -23., -11., 23., 11.], [ -16., -16., 16., 16.], [ -11., -23., 11., 23.], ..., [ 370., 551., 1094., 913.], [ 476., 476., 988., 988.], [ 551., 370., 913., 1094.]])]我们将前1000个anchor绘制在图像上:
# 将生成的anchor绘制在图像上img = Image.open('img3.jpg').resize((800,800))# 绘制图像fig = plt.imshow(img)# 将框绘制在图像上for index, boxes in enumerate(anchors[0]): if index <1000: fig.axes.add_patch(plt.Rectangle( xy=(boxes[0],boxes[1]), width=boxes[2]-boxes[0], height=boxes[3]-boxes[1], fill=False, edgecolor="red", linewidth=1))plt.show()
2.2.2 RPN分类
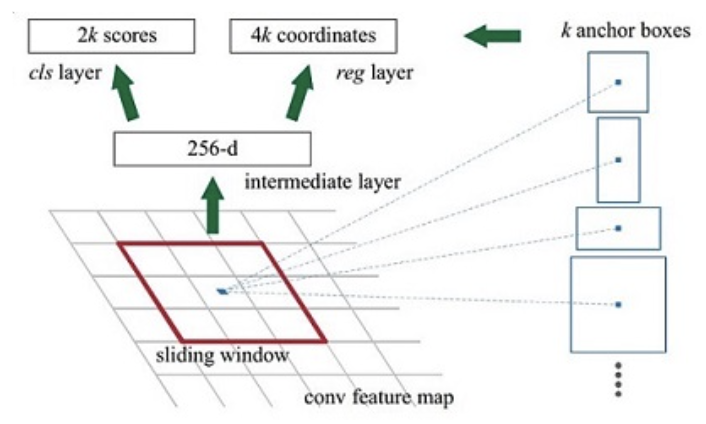
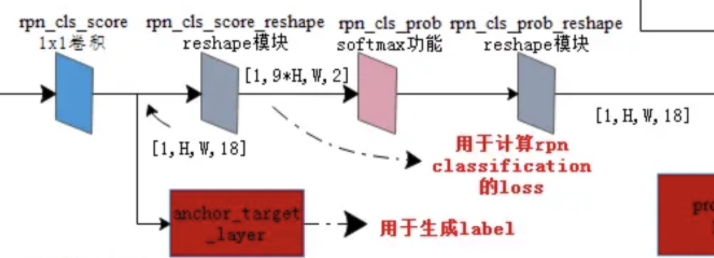
Section titled “2.2.2 RPN分类”一副MxN大小的矩阵送入Faster RCNN网络后,经过backbone特征提取到RPN网络变为HxW大小的特征图。如下图所示,是RPN进行分类的网络结构:(k=9)

先做一个1x1的卷积,得到[batchsize,H,W,18]的特征图,然后进行变形,将特征图转换为[batchsize,9xH,W,2]的特征图后,送入softmax中进行分类,得到分类结果后,再进行reshape最终得到[batchsize,H,W,18]大小的结果,18表示k=9个anchor是否包含目标的概率值。
2.2.3 RPN回归
Section titled “2.2.3 RPN回归”RPN回归的结构如下图所示:(k=9)
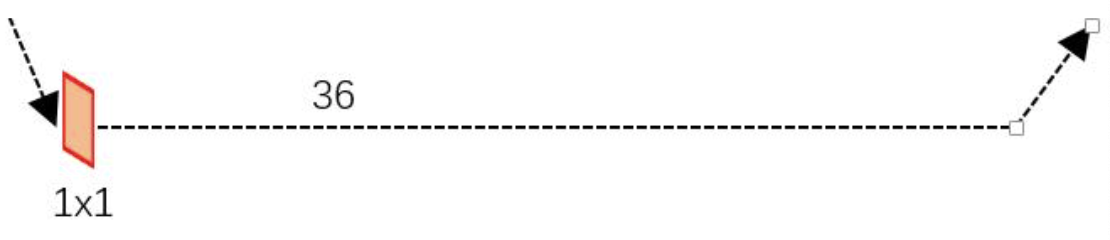
经过该卷积输出特征图为为[1, H, W,4x9],这里相当于feature maps每个点都有9个anchors,每个anchors又都有4个用于回归的:

变换量。
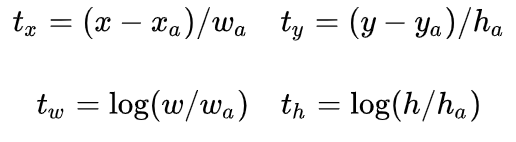
该变换量预测的是anchor与真实值之间的平移量和尺度因子:
该部分代码在fasterRCNN.ipynb中,利用源码我们可以获得对anchors的分类和回归结果,我们以P2特征图为例:
# RPN网络预测分类,返回:logits送入softmax之前的分数cls_logits = model.rpn.head.cls_logits(P2)# RPN网络预测目标框box_pred = model.rpn.head.bbox_pred(P2)结果分析,P2特征图中一共有3x200x200个anchor,输出他们的分类和回归结果
# cls_logits.size(),每一个anchor都进行了分类分析torch.Size([1, 3, 200, 200])# box_pred.size() :回归结果torch.Size([1, 12, 200, 200])其中 cls_logits的取值为:
tensor([[[[-4.9525, -8.6189, -7.9043, ..., -7.1153, -7.0152, -6.2087], [-3.9093, -8.1554, -7.6761, ..., -5.7457, -5.2442, -5.4824], [-2.8913, -6.4549, -6.1540, ..., -3.6381, -3.2611, -3.8778], ..., [-4.0144, -7.9331, -7.2612, ..., -5.9252, -6.3376, -6.1646], [-4.7249, -9.1262, -8.5185, ..., -7.1996, -7.6481, -7.1453], [-2.5904, -5.4544, -5.0440, ..., -4.0076, -4.2866, -4.3868]],
[[-1.2397, -1.9357, -1.6008, ..., -2.5823, -2.3880, -2.2150], [-0.0788, -0.5536, -0.3117, ..., -0.7293, -0.6024, -1.2866], [ 0.2404, -0.4894, -0.1548, ..., 0.3993, 0.3727, -0.5295], ..., [-0.8921, -1.7715, -1.1690, ..., -1.7273, -1.9882, -2.0136], [-1.0738, -1.9363, -1.4287, ..., -2.0681, -2.2555, -2.2789], [-0.4302, -0.6752, -0.3291, ..., -0.6979, -0.8793, -1.3372]],
[[-3.6792, -2.3455, -1.6957, ..., -1.8304, -2.2407, -1.3634], [-2.5546, -0.3214, 0.2112, ..., 0.8942, 0.7678, 1.4243], [-2.0823, -0.4618, 0.0860, ..., 0.9763, 0.9266, 1.4695], ..., [-2.1660, -0.7442, -0.1336, ..., -1.9861, -2.1365, -0.4541], [-2.7510, -1.3608, -0.9367, ..., -2.4219, -2.5253, -0.7463], [-0.2392, 1.5965, 1.6274, ..., 1.0652, 1.1438, 1.5748]]]], grad_fn=<MkldnnConvolutionBackward0>)4.2.4 Proposal层
Section titled “4.2.4 Proposal层”Proposal层负责综合RPN网络对anchors分类和回归的结果,利用回归的结果对包含目标的anchors进行修正,计算出候选区域,送入后续RoI Pooling层中。
Proposal层处理流程如下:
- 利用RPN网络回归的结果
对所有的anchors进行修正,得到修正后的检测框
- 根据RPN网络分类的softmax输出的概率值由大到小对检测框进行排序,提取前6000个结果,即提取修正位置后的检测框
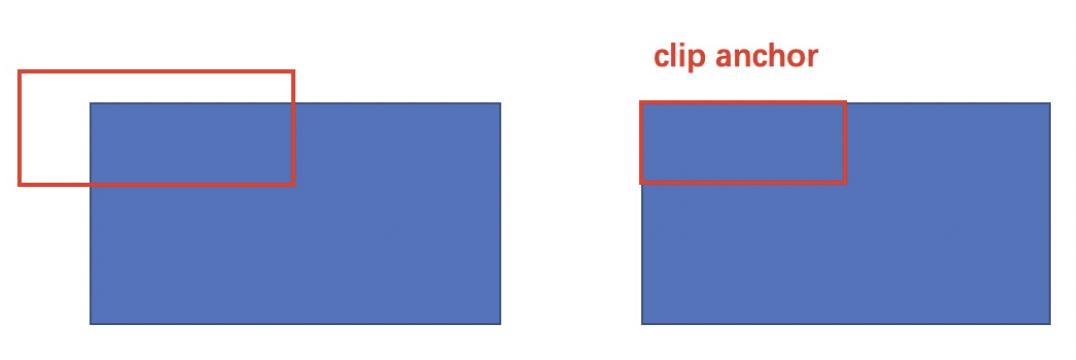
- 限定超出图像边界的检测框为图像边界,防止后续roi pooling时候选区域超出图像边界。
-
对剩余的检测框进行非极大值抑制NMS
-
Proposal层的输出是对应输入网络图像尺度的归一化后的坐标值[x1, y1, x2, y2]。
到此RPN网络的工作就结束了。该部分代码在fasterRCNN.ipynb中,
# RPN网络生成proposalproposal= model.rpn(images,features_fpn)一共生成了1000个候选区域:
# proposal[0][0].size()torch.Size([1000, 4])结果为:
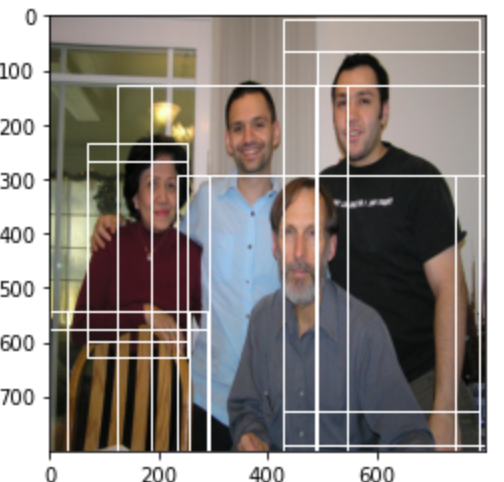
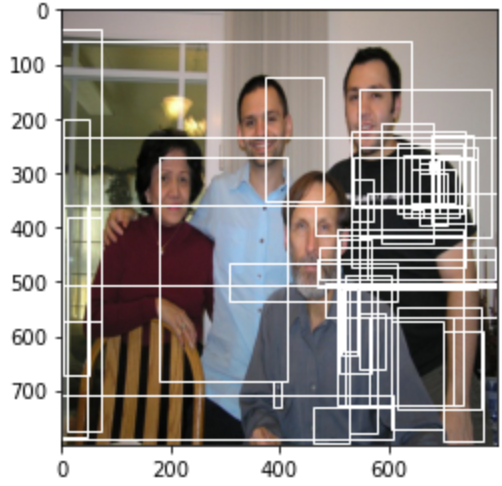
([tensor([[472.2222, 282.6704, 625.2900, 643.2105], [480.1299, 394.6739, 674.9400, 728.7283], [ 11.2800, 170.9804, 361.7238, 751.5059], ..., [574.2663, 279.6072, 591.0003, 294.0474], [577.7798, 278.1065, 596.8508, 299.1753], [576.9445, 164.8038, 674.0577, 269.8643]])], {})将其绘制在图像上
# 候选区域的绘制img = Image.open('img3.jpg').resize((800,800))# 显示图像fig = plt.imshow(img)# 将候选区域显示在图像上for index, boxes in enumerate(proposal[0][0]): fig.axes.add_patch(plt.Rectangle( xy=(boxes[0],boxes[1]), width=boxes[2]-boxes[0], height=boxes[3]-boxes[1], fill=False, edgecolor="blue", linewidth=0.5))plt.show()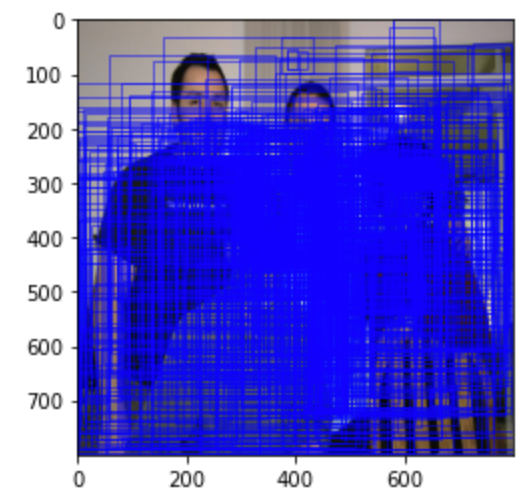
2.3 ROIPooling
Section titled “2.3 ROIPooling”RoI Pooling层则负责收集RPN网络生成的候选区域,并将其映射到特征图中并固定维度,送入后续网络中进行分类和回归。
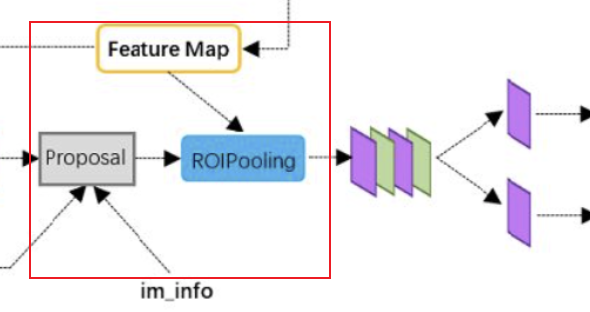
RoI Pooling 的作用过程,如下图所示:
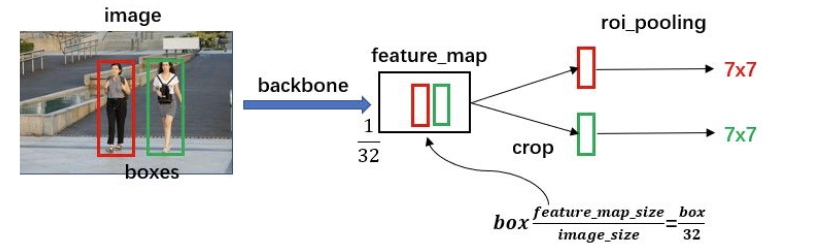
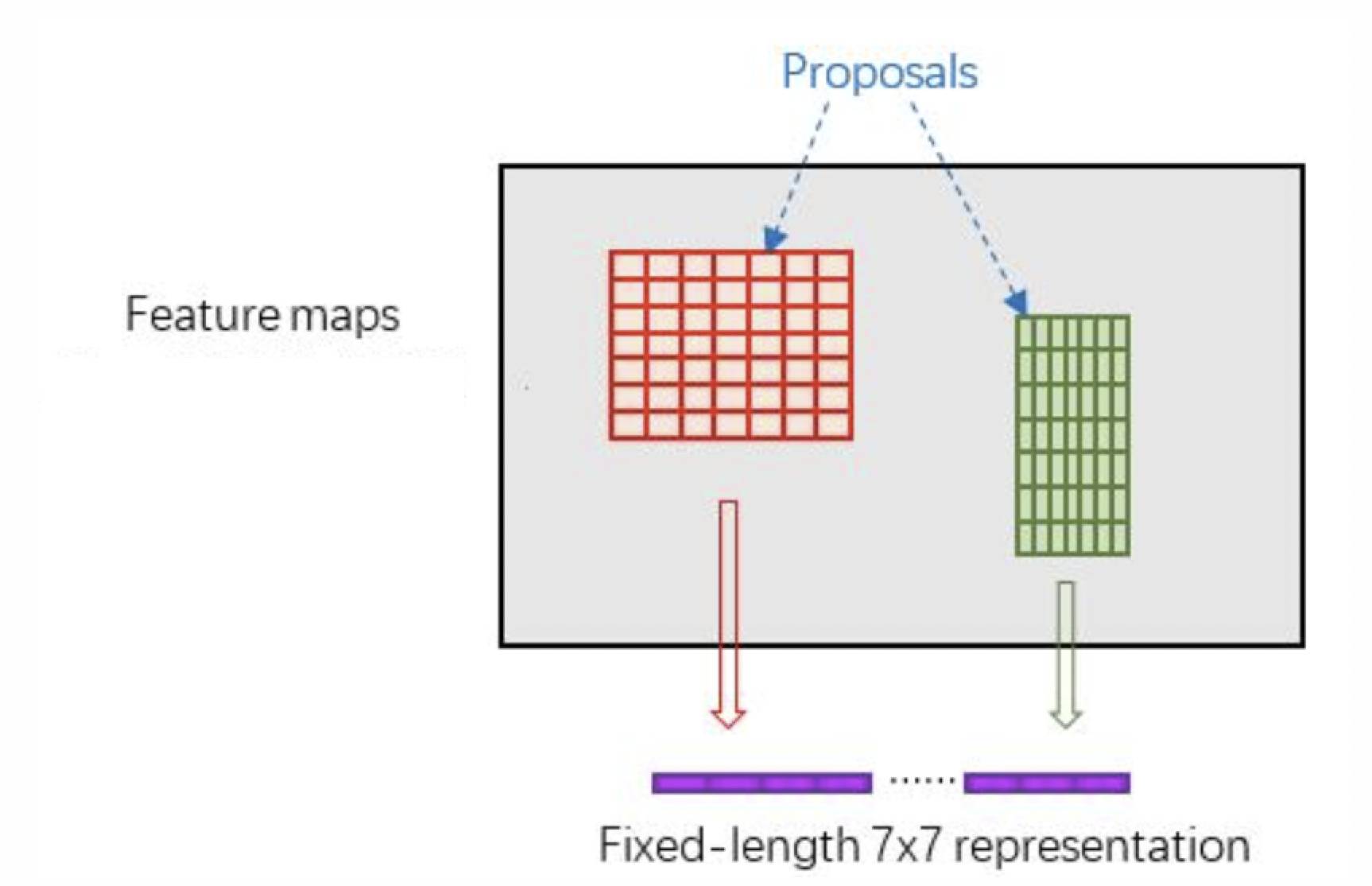
RoIpooling使用最大池化将任何有效的RoI区域内的特征转换成具有pool_H×pool_W的固定空间范围的小的特征图,其中pool_H和pool_W是超参数,比如设置为7x7, 它们独立于任何特定的RoI,如下图所示:
在实现过程中,FPN网络产生了多个尺度特征图,那候选区域要映射到哪个特征图中呢?
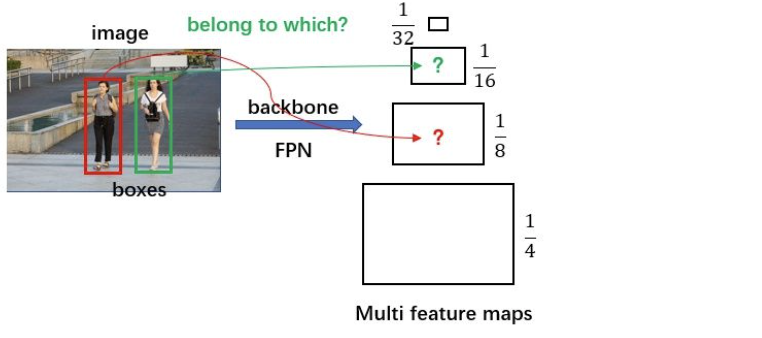
在这里,不同尺度的ROI使用不同特征层作为ROI pooling层的输入,大尺度ROI就用后面一些的金字塔层,比如P5;小尺度ROI就用前面一点的特征层,比如P3,我们使用下面的公式确定ROI所在的特征层:

其中,224是ImageNet的标准输入,k0是基准值,设置为4,w和h是ROI区域的长和宽,假设ROI是112x112的大小,那么k = k0-1 = 4-1 = 3,意味着该ROI应该使用P3的特征层。k值会做取整处理,防止结果不是整数,而且为了保证k值在2-5之间,还会做截断处理。 该部分代码在fasterRCNN.ipynb中,
# ROI Pooling层实现:pool_region_list = model.roi_heads.box_roi_pool(features_fpn, proposal[0],images.image_sizes)输出结果为:每一个候选区域都被固定为7x7大小
# pool_region_list.size()torch.Size([1000, 256, 7, 7])具体如下所示:
tensor([[[[-3.0290e-01, -9.4801e-02, -3.3355e-01, ..., -4.7696e-01, 1.8509e-01, 6.6568e-01], [ 4.8405e-01, -3.9127e-01, -1.2898e+00, ..., -9.8544e-01, 1.6745e-01, 6.4149e-01], [ 2.6655e-01, -7.9603e-01, -7.8114e-01, ..., -5.4995e-01, -1.2209e-01, 4.2529e-01], ..., [-7.9032e-01, -4.3308e-01, -1.0445e+00, ..., -1.0004e+00, -1.4248e+00, -1.0955e+00], [-2.0235e-01, 1.2646e-01, 3.0089e-01, ..., -1.9803e-01, -1.4375e+00, -1.3155e+00], [ 4.0225e-01, 2.8825e-01, 3.6015e-01, ..., 1.7556e-01, -6.1306e-01, -1.1433e+00]]]], grad_fn=<IndexPutBackward0>)2.4 目标分类与回归
Section titled “2.4 目标分类与回归”该部分利用获得的候选区域的特征图,通过全连接层与softmax计算每个候选区域具体属于的类别(如人,车,电视等),输出概率值;同时再次利用回归方法获得每个候选区域的位置偏移量,用于回归更加精确的目标检测框。该部分网络结构如下所示:
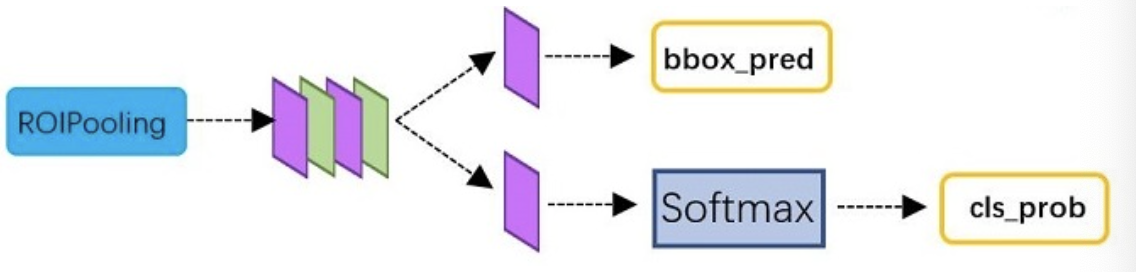
从RoI Pooling层获取到固定大小的特征图后,送入后续网络,可以看到做了如下2件事:
- 通过全连接和softmax对候选区域进行分类
- 再次对候选区域进行回归修正,获取更高精度的检测框
实现流程如下:该部分代码在fasterRCNN.ipynb中,
首先获取网络分类和回归的结果:
# 模型最终输出的结果detection = model.roi_heads(features, proposal[0],images.image_sizes)检测的结果如下所示:
([{'boxes': tensor([[359.8341, 111.3523, 558.0009, 777.9014], [ 86.5611, 290.7203, 459.5951, 785.2094], [ 22.1627, 70.4335, 309.8072, 790.7128], [515.9180, 217.7970, 766.3583, 743.9280], [531.3500, 536.5439, 771.5784, 790.1054], [666.4915, 284.8808, 722.3298, 367.1904], [ 19.0011, 460.5744, 728.2871, 777.8762]], grad_fn=<IndexBackward0>), 'labels': tensor([ 1, 1, 1, 1, 62, 64, 15]), 'scores': tensor([0.9982, 0.9981, 0.9980, 0.9958, 0.9854, 0.1073, 0.0618], grad_fn=<IndexBackward0>)}], {})结果为:一共检测出7个目标,每个目标的目标位置,目标类别id,目标类别置信度等信息构成。
可以将其绘制在图像上:
# 检测结果的绘制detection_boxes = detection[0][0]['boxes'].detach().numpy()img = Image.open('img3.jpg').resize((800,800))# 显示图像fig = plt.imshow(img)# 将检测结果绘制在图像上for index, boxes in enumerate(detection_boxes): fig.axes.add_patch(plt.Rectangle( xy=(boxes[0],boxes[1]), width=boxes[2]-boxes[0], height=boxes[3]-boxes[1], fill=False, edgecolor="purple", linewidth=1))plt.show()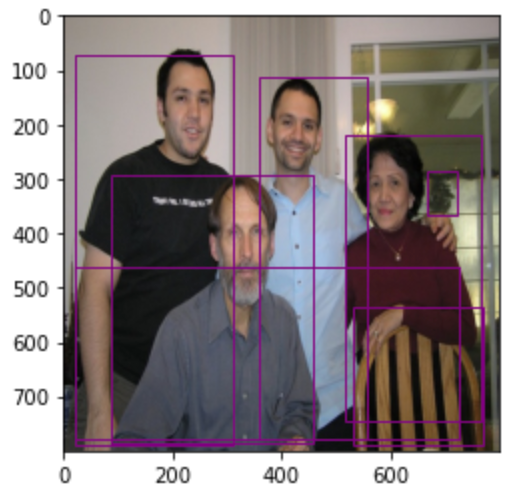
到这我们就完成了整个网络的介绍。
3 FasterRCNN的训练
Section titled “3 FasterRCNN的训练”Faster R-CNN的训练分为两部分,即RPN网络和检测网络fastRCNN的训练:
在介绍网络训练时,我们需要有标注好的训练集数据和网络模型,主要内容如下所示:
该部分代码在fasterRCNN.ipynb中,
- 数据集加载
在这里我们加载VOC数据集,该数据集中包含标注好的数据:
# 数据集记载from voc_data_util import VocDataset,VOC_BBOX_LABEL_NAMESdataset = VocDataset(root='/Users/mac/Desktop/计算机视觉/VOCdevkit/VOC2007', transforms = VocDataset.get_transform())在这里我们依然以预测时的图片为例,展示数据的标注信息:
# 真实值的绘制# 获取图像及对应的标注信息img, targets = dataset[141]img = img.permute(1, 2, 0).numpy().astype(np.uint8)fig = plt.imshow(img)# 将标注信息绘制在图像上for index, boxes in enumerate(targets['boxes'].numpy()): fig.axes.add_patch( plt.Rectangle(xy=(boxes[0], boxes[1]), width=boxes[2] - boxes[0], height=boxes[3] - boxes[1], fill=False, edgecolor="green", linewidth=1))plt.show()展示结果如下图所示:
- 模型加载
在这里加载模型我们不直接加载预训练模型,而是需要根据VOC数据集的类别个数20对模型进行修正,如下所示:
# 模型加载# N+1包含背景num_classes = 21# 模型实例化:不使用预训练模型,修正类别个数,backbone使用预训练结果model = torchvision.models.detection.fasterrcnn_resnet50_fpn( pretrained=False, num_classes=num_classes, pretrained_backbone=True)模型和数据加载进来我们就可以进行模型训练了。
3.1 RPN网络的训练
Section titled “3.1 RPN网络的训练”RPN网络的作用从众多的anchors中提取包含目标的,并且经过回归调整的候选区域。为了训练RPN,给每个anchor分配是否包含目标的标签,也就是正负样本的标记,然后进行训练。
3.1.1正负样本标记
Section titled “3.1.1正负样本标记”正负样本的设置主要分为3类,如下所示:
- 与真实框ground truth(GT)交并比IOU大于0.7的anchor是正样本,即anchor中包含目标,目标值设为1
- 与真实框ground truth(GT)交并比IOU小于0.3的anchor是负样本,即anchor中不包含目标,目标值设为-1
- 其他的anchor舍弃,不参与网络的训练,目标值设为0
接下来,我们在代码中看下样本标记的结果:该部分代码在fasterRCNN.ipynb中,
将产生的159882个anchor与目标真实值的计算交并比设置正负样本:
# 获取anchor对应的目标值:输入:要设置正负样本的anchors(在前面我们已经生成过),样本的真实值即标注信息;输出:rpn的分类目标值,RPN的回归目标值rpn_label_matchs,rpn_target_deltas=model.rpn.assign_targets_to_anchors(anchors,[targets])所有的anchor都设置了分类的目标值和回归的目标值,一共有159882个Anchor。
# anchor对应的分类目标值:rpn_label_matchs[0].size()torch.Size([159882])# 每个anchor对应的框的目标值:rpn_target_deltas[0].size()torch.Size([159882, 4])获取正样本:正样本是包含目标的anchor,其目标值设为1,正样本的个数是29个
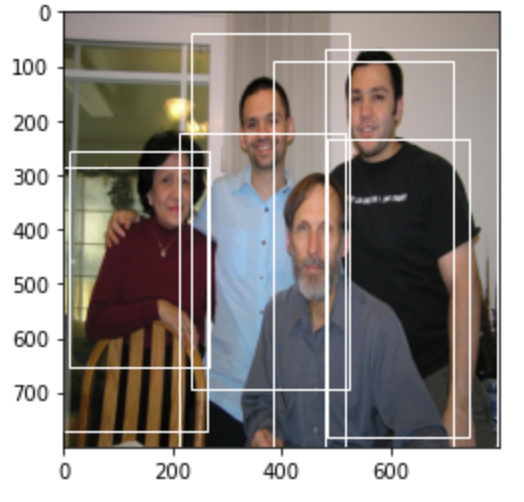
# 属于正样本的anchors,与GT交并比较大的anchor,目标值设为1positive_anchor_ids=torch.where(torch.eq(rpn_label_matchs[0],1))[0].numpy()(15,)# 将正样本绘制在图像上# 绘制anchor的正样本fig = plt.imshow(img)# 遍历所有的正样本的anchor,绘制在图像上for idx in positive_anchor_ids: boxes = anchors[0][idx] fig.axes.add_patch(plt.Rectangle( xy=(boxes[0],boxes[1]), width=boxes[2]-boxes[0], height=boxes[3]-boxes[1], fill=False, edgecolor="white", linewidth=1))plt.show()我们将这些正样本绘制在图像上:可以看出这些anchor与目标还是非常接近的
接下来,我们看下负样本的结果,负样本的目标值是-1,
# 负样本的anchor的idnegitivate_anchor_ids=torch.where(torch.eq(rpn_label_matchs[0],-1))[0].numpy()(712,)# 绘制部分anchor的负样本fig = plt.imshow(img)# 遍历所有的正样本的anchor,绘制在图像上for idx in negitivate_anchor_ids: # 负样本的anchor boxes = anchors[0][idx] # 取余20为0的负样本进行展示 if idx % 20 == 0: fig.axes.add_patch( plt.Rectangle(xy=(boxes[0], boxes[1]), width=boxes[2] - boxes[0], height=boxes[3] - boxes[1], fill=False, edgecolor="white", linewidth=1))plt.show()同样我们也将负样本展示在图像上,从图像可以看出这些负样本的anchor与目标差距还是很大的。
3.1.2 RPN网络的损失函数
Section titled “3.1.2 RPN网络的损失函数”RPN网络的损失函数是:

其中
-
表示anchor的索引
-
是第i个anchor 预测为目标的可能性,为ground-truth标签。如果这个anchor是positive的,则ground-truth标签为1,否则为0。(即当第i个anchor与GT间IoU>0.7,认为是该anchor是positive,标签为1;反之IoU<0.3时,认为是该anchor是negative,标签为0)
-
表示表示正样本anchor到预测区域bounding box的4个参数化预测结果,是这个positive anchor对应的ground-truth box的偏移,如下所示:
预测值:

真实值:

其中,x,y,w,h表示窗口中心坐标和窗口的宽度和高度,变量x, 分别表示预测窗口、anchor窗口和Ground Truth的坐标(y,w,h同理)
回归目标值的实现如下所示:
# 网络回归的目标值regression_targets = model.rpn.box_coder.encode(rpn_target_deltas, anchors)结果如下所示:每个anchor都有相应的回归的目标值。
# regression_targets[0].size()torch.Size([159882, 4])(tensor([[ 3.1478, 30.9188, 1.6453, 2.3698], [ 4.5250, 21.2567, 2.0082, 1.9951], [ 6.5818, 14.7873, 2.3829, 1.6322], ..., [-0.8110, -0.1431, -1.1108, -0.4308], [-1.1469, -0.1011, -0.7644, -0.7775], [-1.6221, -0.0715, -0.4177, -1.1240]], dtype=torch.float64),)整个Loss分为两部分:分类和回归的损失
- 分类的损失(classification loss),是一个二分类器的softmax loss。

- 是回归损失,为损失,并且只有正样本才参与回归损失计算

- 和分别用来标准化分类损失项和回归损失项,默认用batch size设置,用anchor位置数目~2000初始化
- 和相差过大,用参数λ来平衡两者,一般取值为和的比值10即可。
3.2 FastRCNN网络的训练
Section titled “3.2 FastRCNN网络的训练”使用RPN网络收集到的候选区域和imageNet预训练的卷积网络提取的特征对检测的FastRCNN网络进行训练。
3.2.1 正负样本标记
Section titled “3.2.1 正负样本标记”在FastRCNN网络训练时:
- 首先将与真实框ground truth(GT)交并比IOU大于0.5的候选区域设为正样本,类别的目标值是GT的类别
- 将与真实框ground truth(GT)交并比IOU小于0.5的候选区域设为负样本,类别的目标值是0
接下来我们在代码看下正负样本标记的结果:该部分代码在fasterRCNN.ipynb中,
将proposal层产生的候选区域与目标真实值的计算交并比设置正负样本:
# fastRCNN的正负样本设置# 输入:RPN网络生成的候选区域,# 输出:参与训练的候选区域proposals及这些候选区域的索引matched_idxs,候选区域分类的目标值labels,回归的目标值regression_targets# 从生成的所有的proposal中选择正负样本送入网络中proposals, matched_idxs, labels, regression_targets = model.roi_heads.select_training_samples( proposal[0], [targets])最终获取的候选区域的个数为512,labels中0值对应的背景类别,非零值对应着所属的类别ID
# proposals[0].size()torch.Size([512, 4])# regression_targets[0].size()torch.Size([512, 4])# labels[tensor([15, 15, 15, 15, 0, 0, 15, 0, 15, 15, 15, 15, 0, 0, 15, 15, 0, 15, 0, 15, 0, 15, 15, 15, 15, 0, 15, 15, 15, 0, 0, 0, 15, 0, 15, 15, 0, 0, 15, 15, 0, 0, 0, 0, 0, 15, 15, 0, 0, 0, 0, 0, 0, 15, 15, 15, 0, 15, 0, 0, 0, 15, 15, 0, 0, 0, 0, 0, 0, 0, 15, 15, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 15, 0, 0, 0, 15, 0, 0, 15, 0, 15, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 15, 0, 0, 0, 0, 0, 0, 15, 0, 0, 0, 9, 15, 0, 0, 0, 0, 0, 15, 15, 0, 0, 0, 15, 0, 0, 0, 0, 0, 0, 9, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 15, 0, 0, 15, 0, 0, 15, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 15, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 9, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 15, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 15, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 9, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 15, 0, 0, 9, 0, 0, 0, 0, 0, 0, 0, 0, 0, 15, 0, 0, 15, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 9, 15, 15, 15, 15])]获取正样本:正样本是负责目标检测的候选区域,其目标值不是0,正样本的个数是64个
# 获取正样本的索引positive_proposal_ids=torch.where(torch.gt(labels[0],0))[0].numpy()(64,)将这些正样本展示在图像上:
# 绘制部分候选区域的负样本fig = plt.imshow(img)# 遍历所有的负样本的候选区域,绘制在图像上for idx in positive_proposal_ids: # 正样本的proposals boxes = proposals[0][idx] # 取余10为0的负样本进行展示 if idx % 10 == 0: fig.axes.add_patch( plt.Rectangle(xy=(boxes[0], boxes[1]), width=boxes[2] - boxes[0], height=boxes[3] - boxes[1], fill=False, edgecolor="white", linewidth=1))plt.show()结果如下图所示,可以看出这些框跟真实值是非常接近的
同样我们也可以获取负样本(背景),并绘制在图像上:
# 负样本对应的IDnegitivate_proposal_ids = torch.where(torch.eq(labels[0], 0))[0].numpy()(448,)# 绘制部分候选区域的负样本fig = plt.imshow(img)# 遍历所有的负样本的候选区域,绘制在图像上for idx in negitivate_proposal_ids: # 负样本的proposals boxes = proposals[0][idx] # 取余10为0的负样本进行展示 if idx % 10 == 0: fig.axes.add_patch( plt.Rectangle(xy=(boxes[0], boxes[1]), width=boxes[2] - boxes[0], height=boxes[3] - boxes[1], fill=False, edgecolor="white", linewidth=1))plt.show()结果如下图所示:
3.2.2 FastRCNN的损失函数
Section titled “3.2.2 FastRCNN的损失函数”FastRCNN的输出由两部分组成:一部分是softmax层进行分类,输出类别有K个类别加上”背景”类,另一部分是回归bounding box regressor。也就是:
- 一部分输出在K+1个类别上的离散概率分布(每个候选区域),。通常,通过全连接层的K+1个输出上的Softmax来计算p。
- 另一部分输出对于由K个类别中的每一个检测框回归偏移,。其中指定相对于候选框的尺度不变转换和对数空间高度/宽度移位,与在RPN网络中是一样的。
每个训练的候选区域用 分类目标值u和检测框回归目标值v标记 。背景样本用u=0来表示,对每个标记的候选区域使用多任务损失L以联合训练分类和检测框回归:

其中,表示交叉熵损失,第二个损失,是定义目标值和预测检测框的四元组之间的损失使用smoothL1损失计算,同样是只有正样本(非背景)的候选区域才计算回归损失,参数λ设为1。
3.3 FasterRCNN的训练
Section titled “3.3 FasterRCNN的训练”前面我们已经介绍了网络模型架构和预测结果,在网络预测前我们需要对网络进行训练,接下来我们就来完成模型训练,模型训练也就是要使用损失函数,进行反向传播,利用优化器进行参数更新,训练的流程是:
-
使用Dataloader加载训练数据
-
指定优化器:在这里我们使用加动量的SGD方法
-
设置轮次epoch,遍历每个轮次获取batch数据送入网络中进行预测,计算损失函数,使用反向传播更新参数,完成模型训练
接下来我们按照这个流程完成模型训练。该部分代码在fasterRCNN.ipynb中,
- 使用Dataloader加载训练数据
from torch.utils.data import DataLoaderdef collate_fn(batch): return tuple(zip(*batch))
# 获取batch的数据,送入网络中进行训练train_data_loader = DataLoader( dataset, batch_size=2, shuffle=True, collate_fn=collate_fn)在这里我们将一个batch中的数据展示出来:
# 遍历数据,获取第一个batch的数据进行展示for i, data in enumerate(train_data_loader): inputs, labels = data # batch的大小 print('图片个数:',len(inputs)) print('目标值:',labels) break结果为:
图片个数: 2目标值: ({'boxes': tensor([[654.4000, 0.0000, 798.4000, 744.3851], [481.6000, 79.1444, 774.4000, 742.2460], [403.2000, 320.8556, 619.2000, 795.7219], [160.0000, 329.4117, 488.0000, 793.5829], [ 75.2000, 348.6631, 265.6000, 774.3316], [ 35.2000, 468.4492, 102.4000, 648.1283], [ 1.6000, 444.9198, 96.0000, 750.8021]], dtype=torch.float64), 'labels': tensor([10, 10, 10, 10, 10, 10, 10]), 'image_id': tensor([3172]), 'area': tensor([31320., 56730., 29970., 44485., 23681., 3528., 8437.]), 'iscrowd': tensor([0, 0, 0, 0, 0, 0, 0])}, {'boxes': tensor([[432.0000, 170.6666, 571.2000, 206.9334], [604.8000, 142.9333, 648.0000, 183.4667]], dtype=torch.float64), 'labels': tensor([6, 6]), 'image_id': tensor([1001]), 'area': tensor([1479., 513.]), 'iscrowd': tensor([0, 0])}- 优化器设置
# 获取所有要进行训练的参数,设置优化器params = [p for p in model.parameters() if p.requires_grad]optimizer = torch.optim.SGD(params, lr=0.005, momentum=0.9, weight_decay=0.0005)- 遍历每个轮次进行模型训练
迭代次数itr = 1# 存放训练损失total_train_loss = []# 损失值losses_value = 0# 遍历每个轮次进行训练for epoch in range(2): # 训练模式 model.train() train_loss = [] # 进度条 # 遍历数据,获取图像,目标值和图像id for images, targets in train_data_loader: # 将数据送入网络中进行训练,获取损失值(RPN的损失+FastRCNN的损失),将信息打印出来分析 loss_dict = model(images, targets) print(loss_dict) # 将损失求和 losses = sum(loss for loss in loss_dict.values()) # 获取loss值 losses_value = losses.item() train_loss.append(losses_value) # 进行反向传播,更新参数 optimizer.zero_grad() losses.backward() optimizer.step() # 日志信息 print(f"Epoch: {epoch + 1}, Batch: {itr}, Loss: {losses_value}") # 迭代次数增1 itr += 1 # 获取当前轮次的损失 epoch_train_loss = np.mean(train_loss) # 轮次损失写入到列表中 total_train_loss.append(epoch_train_loss)结果为:
{'loss_classifier': tensor(29.4023, grad_fn=<NllLossBackward0>), 'loss_box_reg': tensor(2.7863, grad_fn=<DivBackward0>), 'loss_objectness': tensor(6.2046, grad_fn=<BinaryCrossEntropyWithLogitsBackward0>), 'loss_rpn_box_reg': tensor(0.8658, dtype=torch.float64, grad_fn=<DivBackward0>)}Epoch: 1, Batch: 1, Loss: 39.25891468526476{'loss_classifier': tensor(60.0640, grad_fn=<NllLossBackward0>), 'loss_box_reg': tensor(0.72087, grad_fn=<DivBackward0>), 'loss_objectness': tensor(0.22394, grad_fn=<BinaryCrossEntropyWithLogitsBackward0>), 'loss_rpn_box_reg': tensor(0.291624814647, dtype=torch.float64, grad_fn=<DivBackward0>)}Epoch: 1, Batch: 2, Loss: 61.38612275054647。。。。。。损失函数的结果中包含:rpn的损失(loss_objectness,loss_rpn_box_reg)和fastRCNN的损失(loss_classifier,loss_box_reg),将他们加在一起就可得到整个模型的损失进行反向传播。
我们多训练几个轮次,损失函数的变换曲线如下图所示:
# 绘制损失函数变化的曲线plt.plot(range(len(total_train_loss)),[loss.numpy() for loss in total_train_loss])plt.grid()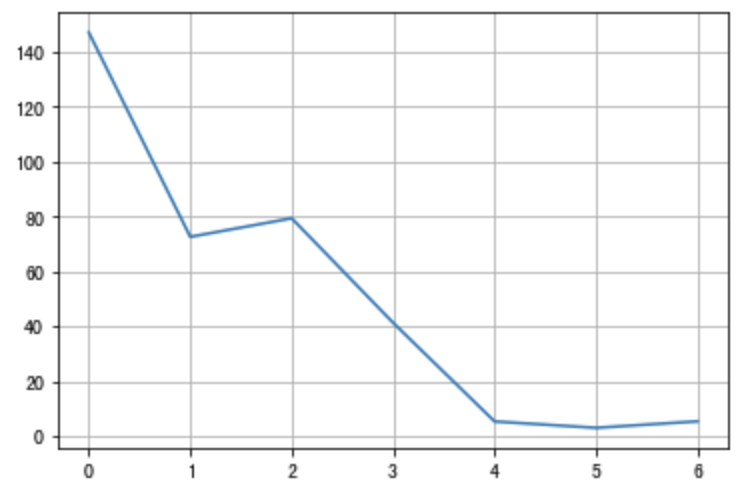
当我们训练好模型后,就可以使用训练好的模型进行预测了,也就是本节开头给大家介绍的内容。
总结
- 熟悉FasterRCNN目标检测的思想
利用CNN网络进行特征提取,利用RPN生成候选区域,最后进行分类和回归
- 知道anchor的思想
anchor技术将检测问题转换为**“这个固定参考框中有没有目标,目标框偏离参考框多远”**,不再需要多尺度遍历滑窗
- 掌握RPN网络是如何进行候选区域的生成的
通过softmax判断anchors属于positive或者negative,再利用bounding box regression修正anchors获得精确的proposals
- 掌握ROIPooling的使用方法
RoIpooling使用最大池化将任何有效的RoI区域内的特征转换成具有H×W的固定空间范围的小feature map
- 知道fasterRCNN的训练方法
正负样本设置的方法,损失函数的定义,端到端的网络训练